

利用服务器生成的大气校正,精确点定位实时运动学(PPP-RTK)可以快速收敛地获得高精度解。PPP-RTK用户关心的是如何使用修正和可以达到的性能水平;因此,我们的研究主要集中在校正方法、先验随机建模和定位性能评估方面。相反,对于服务器来说,提高所提供更正的精度并考虑成本、计算负担和用户性能之间的平衡是至关重要的,特别是对于商业应用程序。我们利用法国国家GPS网的不同尺度生成电离层和对流层改正,并通过建立站间距离的误差函数生成相应的不确定性信息。在22 ~ 251 km的站间距离范围内,分析了校正质量和相应的用户性能。结果表明,随着台站数量的增加,大气改正精度有所提高,但当台站间距小于50 km时,提高不显著。在用户性能方面,当站间距离约为23 km时,与具有模糊度分辨率的传统PPP解决方案相比,在水平和垂直方向上的收敛时间分别最大可缩短93%和85%。但是,在100公里以内的站点间距仍然可以支持3分钟的收敛;因此,应该考虑服务器预算和用户性能的平衡,而不是密集的网络。
精确点定位通常需要较长的初始收敛时间才能达到厘米级的定位精度。在传统的PPP处理中引入卫星相位偏差和大气校正,使PPP实时运动学(PPP - rtk)技术将收敛时间缩短到几分钟,有利于各种应用领域,特别是实时情况。
w
bbena等人(2005)首先提出了PPP-RTK概念,该概念使用RTK网络在区域网络内执行歧义解决并生成状态空间表示(SSR)更正。通过应用这些校正,用户可以在几秒钟内达到类似rtk的厘米精度。从那时起,服务器端和用户端都进行了研究。双方的调查在不同的模式和不同的网络尺度上存在差异(Li et al. 2011, 2021)。在一些研究中,卫星偏差被估计,电离层修正是可选的,这分别被称为电离层浮动和电离层加权解决方案。生成的电离层改正可以是倾斜或垂直格式,而对于其他方法,对流层改正也与卫星偏差和电离层改正一起建模。这些研究评估了不同网络配置对用户性能的相应影响。Psychas et al.(2018)发现,当用户处电离层校正精度优于5 cm时,可以实现快速PPP-RTK解决方案。Zhang等人(2018)重新审视了undifferentiedand uncombined (UDUC) PPP-RTK网络模型的三种变体,并研究了将生成的卫星相位偏差传输给用户的不同线性组合。Li et al.(2020)利用连续运行参考站(CORS)网络产生的高精度大气校正,利用GPS平均1.5历元获得厘米级精度,BDS-2+3平均1.6历元获得厘米级精度。
通过从超密集的区域网络(例如站间距离为10公里)产生电离层改正,理论上期望改正更接近物理误差源,从而更好地代表误差特征。换句话说,用于生成修正的网络越密集,用户的收敛时间就越短。Nadarajah等人(2018)分别用澳大利亚范围内和30公里的小规模网络估算了卫星改正、相位偏差和可选电离层改正,用户位置可以在2分钟内与小规模网络收敛。在这一贡献中没有应用对流层改正,电离层改正(如果适用)是使用反距离加权(IDW)确定的。Zhao et al.(2021)同时估算了两种不同网络尺度下的垂直电离层延迟和接收机硬件偏差,而使用经验方差为0.15 m的IDW计算用户处的电离层改正。结果表明,对于较小的和较大的网络,模糊度的解决分别可以在3分钟和几分钟内完成。Psychas等人(2020)主要研究了电离层加权PPP-RTK,该方法使用最佳线性无偏预测器估计网络解决方案中的倾斜电离层延迟和卫星偏差。结果表明,用户的收敛时间与网络密度呈线性关系。在实际应用中,由于成本的原因,服务区周围网络中的站点密度通常是有限的。一个更密集的网络隐含地需要更多的解计算和大气建模负载。
对大气校正精度的实际估计是可能影响用户性能的另一个因素。在用户随机模型中通常考虑这一知识,它的现实性可以加快扩展卡尔曼滤波(EKF)的收敛速度。电离层校正随机模型除了固定方差外,还常用距离线性相关方差(Nadarajah et al. 2018)和距离指数相关随机模型(Zha et al. 2021)。Zhang等(2022)的研究表明,对电离层延迟约束采用不同的先验精度时,与传统的PPP-AR相比,方差越小收敛时间越长,方差越大收敛时间相同。最近,Li et al.(2022)提出,通过(1)计算电离层模型值与各站估计值的差值,(2)建立距离相关模型,确定不同网络尺度下的插值误差,生成电离层校正的不确定性信息。与大多数研究人员使用的固定精度或经验精度相比,这种方法在生成电离层不确定性图时已被证明是有用的。但是对于不同网络规模的用户是否适用以及由此产生的性能如何,仍然值得研究。
除了电离层校正外,现有模式计算的对流层天顶静水延迟(ZHD)也足够精确,可以应用。但将天顶湿延迟(ZWD)校正应用于PPP-RTK时,是否能进一步加快收敛速度,以及在多大程度上加快收敛速度,仍值得研究。Oliveira Jr.等人(2017)用密集和稀疏网络建模了ZWD。结果表明,定位精度变化不大,但密集网络下ZWD的收敛时间要快于稀疏网络。
以往的研究主要集中在对用户端的影响上,对大气模式的现实评估力度不够,大多采用基于经验值的随机模式。对于目前的工作,在服务器端估计了不同规模网络的电离层和对流层校正的精度,并在用户端使用这些校正评估了性能。通过这种方式,本研究旨在概述和评估(1)服务器网络中站间距离如何影响大气改正量的产生和用户定位性能;(2)网络的何种密度足以满足对定位精度和收敛时间有不同要求的用户;(3)当网络足够密集时,超密集网络是否仍能显著改善用户解决方案。
首先介绍了PPP-RTK的方法,以及不同规模的网络和服务器和用户的详细处理策略。然后分析了不同网络对电离层不确定性图的评估,以及用户在收敛时间、首次固定时间、固定速率和定位精度方面的性能。最后,给出了结论和今后的工作。
图1显示了本研究中服务器端和用户端的简化流程图。应用二维处理策略在服务器端生成大气校正,并在用户端执行PPP-RTK。UDUC模型非常适合于PPP-RTK服务器,因为原始GNSS测量可以直接用于估计倾斜电离层和天顶对流层湿延迟。为了确保估算大气改正量的精度,使用Laurichesse et al.(2009)中描述的方法在服务器端解决整数模糊。采用国际GNSS服务(IGS)整数时钟产品,在文件头中给出宽通道分数周期偏差(FCB),窄通道分数周期偏差(FCB)被吸收到卫星时钟校正中。这样,在根据现有模型应用卫星相位中心偏移/变化(Schmid et al. 2005)、相位上弦(Wu et al. 1993)、差分码偏差、海洋潮汐载荷和相对论效应(Kouba 2009)等必要的修正后,可以使用最小二乘模糊去相关平差(LAMBDA)方法(Teunissen 1995)逐点获得服务器的模糊固定解。因此,可以推导出相应的高精度电离层和对流层延迟。最后,使用改进的最优拟合系数(MOFC)模型(Cui et al. 2022)对区域对流层校正进行建模,并将模型系数和建模精度因子广播给用户。相应的不确定性映射也会对用户性能产生重大影响。在本文中,还生成了Li等人(2022)描述的电离层不确定性图,该图被证明优于经验值。
图1
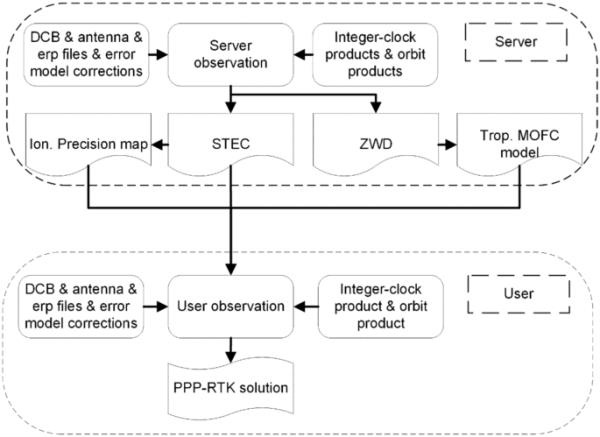
简化了PPP-RTK在服务器端和用户端的流程图。服务器端(上)包含校正产品的生成,而用户端(下)利用这些校正用于PPP-RTK
对于PPP-RTK用户,传输的是所有参考站的倾斜电离层改正量和对流层延迟模型系数。用户可以从附近的参考站插入修正,并将其应用到他们的位置。PPP-RTK用户的原始UDUC数学模型可以简单地表示为:
(1)
其中和分别为编码和相位测量预拟差,并应用了误差模型和校正,分别为卫星指数和频率指数。、、和是从卫星到接收机的视距单位方向矢量。表示对流层延迟的湿映射函数,表示第j个频率的相位测量波长。是一个常数,其中是频率。为用户站坐标(坐标系与使用的精密产品一致),为接收机时钟偏移,为天顶湿对流层延迟,为倾斜电离层对第一频率和卫星S的影响,为相位测量中的模糊项。通过服务器广播的校正,对流层约束()和相对于参考卫星r()的卫星间差异STEC()可以附加到原始功能模型中作为虚拟观测,如
(2)
用表示残差。因此,对应的随机模型可以定义为,是反映相位噪声()、码噪声()、先验对流层约束()、电离层约束()精度的对角矩阵。因此,滤波后所有估计的协方差矩阵可以计算为(Zhang and Li 2016;Banville and Langley 2013)
(3)
作为原始设计矩阵和虚拟设计矩阵的组合形式的设计矩阵在哪里
(4) (5)
这样,对校正精度的影响的分析,对定位精度和西城基于“增大化现实”技术可以很容易地由评估的协调和模糊参数的协方差,即左上角3×3子矩阵是定位精度,右下s×s子矩阵是模糊方差和协方差信息,可以进一步利用评估基于“增大化现实”技术。这些知识用于执行以下仿真分析。
在日常应用中,大多数用户期望单历元分米级定位精度。为了从理论上了解哪种质量水平可以满足用户的需求,图2给出了位置精度与电离层/对流层延迟校正精度之间的关系以及固定WL模糊的好处。通常,自举的成功率(SR) (Teunissen and Verhagen 2008)是评估修复歧义可能性的重要指标。因此,在本次模拟过程中,研究了大气校正精度对WL模糊度分辨率的影响。在模拟评估中,选取AJAC站在2022年第224天的第一个历元,使用最小二乘滤波和大气校正作为虚拟观测。利用该历元的观测数据,设计矩阵可以用用户位置和实际卫星坐标参数化。该站采用双频测量跟踪9颗GPS卫星,天顶方向码位和相位测量精度分别设置为0.6 m和0.003 m,采用仰角相关加权;于是,便形成了。在评估电离层延迟精度的影响时,对流层延迟精度固定为0.03 m。同样,在研究对流层精度与位置精度的关系时,设为0.1 m。由式(3)导出的方差和协方差信息用于评估水平和垂直定位精度并计算sr。以地心、地心(ECEF)表示的估计坐标协方差信息转换为东、北、上分量。自举设置了0.99的阈值,这表明当SR大于0.99时,可以固定和严格约束虚观测的WL模糊度,从而有利于定位性能。这里没有给出NL模糊度分辨率,因为很难在模拟结果中使用单个历元来修复NL模糊度,因此,解决方案将与float解决方案相同。
图2
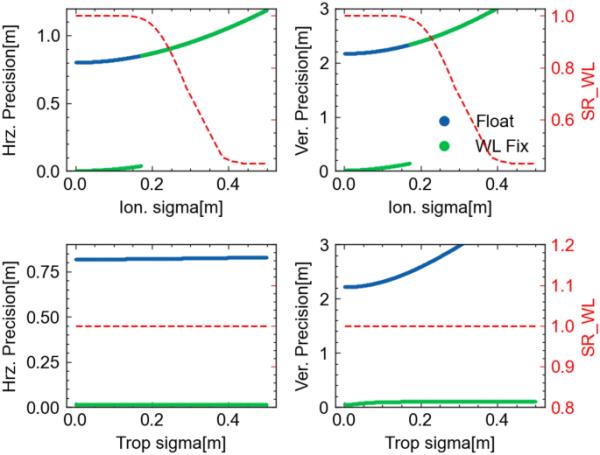
水平/垂直位置精度与电离层/对流层校正精度的关系,以及固定WL模糊的好处
在图2中,对于浮子PPP-RTK方案,随着校正精度的提高,相应的模拟位置精度可以得到提高。垂直方向上的精度提高比水平方向上的精度提高更显著。相对于水平方向上较小的改进,对流层改正精度主要贡献于垂直分量,这与实际数据处理经验所期望的一致。更高的校正精度可以解决WL歧义,并且即使在单个历元中也可以显著提高WL歧义修复的定位精度。随着对流层校正精度的变化,SR保持恒定值,因为默认设置为0.1 m,根据右上图的结果,SR是最优的。此外,WL模糊度与对流层折射的相关性较小。从图2的模拟结果可以得出,对于厘米级单历元WL AR解,预计大气校正精度在几厘米以内。
法国研究实验室的国家GNSS网络(http://k1.fpubli.cc/file/upload/202308/16/hzf5nzw13g2)。旨在为科学界提供GNSS观测,致力于内外地球物理和大地测量学的科学研究和地球观测。由于相对平均和密集的站点分布,它是这一贡献中使用的理想网络。在服务器端,所有站点被分成5个网络,这些网络的平均站间距离不同,由不同数量的站点组成,从13个到200多个不等,即PPPRTK-13、PPPRTK-27、PPPRTK-50、PPPRTK-160和PPPRTK-ALL。每个方案名称的后缀号表示使用的站点数。图3显示了不同站间距网络的站点分布,从中可以看出,所有选择的网络都覆盖了法国,每个绿点代表一个服务器站,而红星代表性能评估中使用的单个用户站。这些网络的平均站间距离也在右下角提供,以便比较。所有实验网络的平均站间距离在22 ~ 251 km之间,可以代表PPP-RTK在不同网络规模下的不同应用。
图3
服务器(绿色)和用户(红色)的站点分布具有不同的站间距离
为了评估不同网络产生的修正对用户性能的影响,我们选择了14个不包括在服务器端的用户站,如表1所示。这些电台配备了不同的接收机和天线类型,这可以更好地显示用户的平均性能。对2022年DOY 244 ~ DOY 273(9月)1个月采样率为30s的观测数据进行处理,将用户站观测文件拆分为1小时数据进行模拟运动模式处理,即逐历元估计接收机坐标,假设用户处于运动模式。因此,总共处理了10080批数据。由于大多数台站只能观测GPS星座,所以只使用GPS卫星的双频观测数据,并使用GFZ的整数卫星时钟和精确轨道产品以及code的P1C1差分码偏差(DCB)产品进行数据处理。处理策略的更多细节见表2。
表1用户站接收机和天线信息
表2服务器和用户的处理策略
在本节中,我们将评估在服务器端产生的大气校正和PPP-RTK在用户端的定位性能。在大气校正方面,首先显示电离层误差图,以说明电离层校正在不同区域的精度,然后显示ZWD残差图。然后,通过分析不同站距网络下用户的TTFF、固定率、定位误差和收敛时间来评价用户性能。TTFF定义为第一个整数模糊度解析所需的时间,固定率定义为固定历元个数与总历元个数的比值。运动学过程的定位误差被认为是解与参考坐标之差的均方根误差。收敛时间是收敛到1dm所需的时间。参考坐标使用周最小二乘解生成。
如图4所示,以0.5°× 0.25°的网格分辨率绘制了不同站距网在两个特定时期(UTC 0:00和14:00)的电离层误差图。地图的生成采用Li et al.(2022)提出的方法,该方法包括:(1)逐站计算电离层插值值与ppp推导值之间的差值;(2)建立与距离相关的函数来确定插值误差。误差分布在0 ~ 0.2 m之间,而透明区域包含大于0.2 m的电离层误差,对如此大误差的用户贡献较小。从图4可以明显看出,校正精度大于0.2 m的区域随着服务器端站点数量的增加而增大,但当使用超过160个站点时,这种趋势并不明显。通过对不同时期误差图的比较,得出14点校正误差大于0点校正误差的结论,特别是在下午电离层活动水平的服务域边缘比午夜校正误差更大。当服务器使用的站点数量较多,如超过160个时,主服务区电离层误差在0.05 m以内。根据截面方法中的仿真分析,这种精度对快速收敛和准确定位性能有重要贡献。注意到PPPRTK-all服务域边缘的电离层不确定性比PPPRTK-160差,这可能是由于插值中使用的PPPRTK-all最近的三个服务站的改正量意外地比PPPRTK-160差,导致PPPRTK-all的不确定性更差。但是,这并不重要,因为在PPP-RTK用户案例中,用户位置应该位于服务器站点的覆盖区域内。
图4
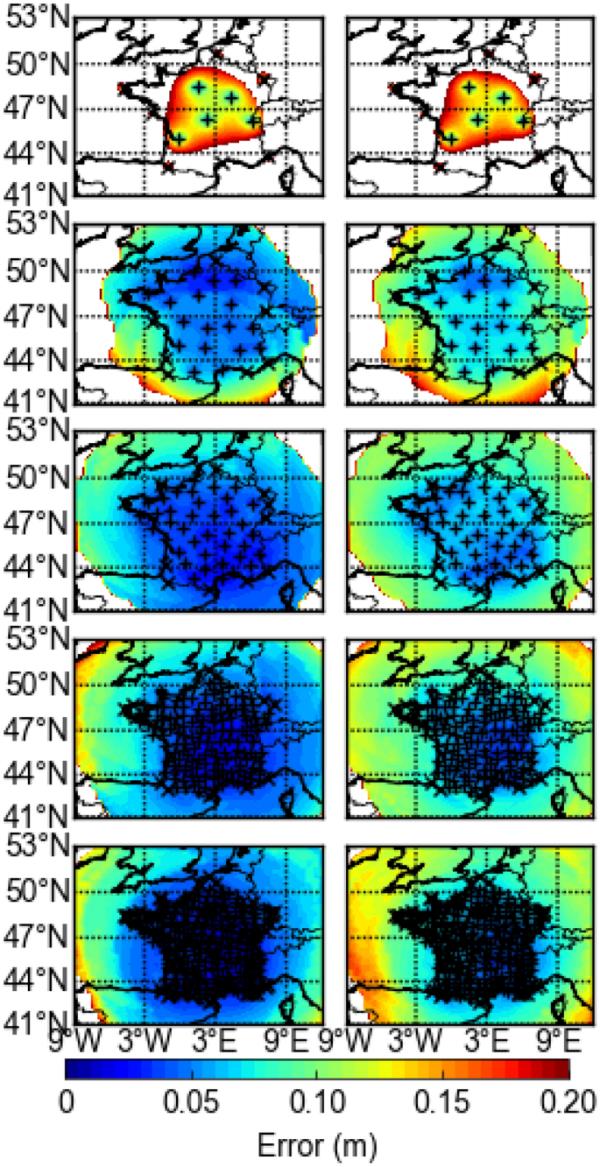
不同尺度网络在0点(左图)和14点(右图)的倾斜电离层插值误差图。黑叉表示服务器站,面板从上到下分别代表PPPRTK-13、PPPRTK-27、PPPRTK-50、PPPRTK-160和PPPRTK-all
如前面的模拟所示,高精度对流层校正有望提高PPP-RTK的垂直定位性能。生成ZWD残差图是为了提供对流层校正质量的清晰视图。对流层校正每5分钟产生一次,但只选择一个特定的历元(2022年9月15日14:00)进行分析。图5概述了五种网络配置的逐站残差,这是模型与从服务器端导出的“真实”值之间差异的绝对值。对于不同的网络配置,ZWD残差大多在3.0 cm以内,所建立的ZWD模型可以很好地拟合服务器站点。这表明对服务区域周围用户的对流层校正精度也可以达到较高水平。仿真结果表明,站间距离为50 km时,最大残差为6.7 cm,平均残差为1.9 cm,有利于提高用户性能,特别是在垂直分量上。
图5
2022年9月15日14:00时不同网络ZWD残差图图中分别为PPPRTK-13(左上)、PPPRTK-27(右上)、PPPRTK-50(左中)、PPPRTK-160(右中)和PPPRTK-all(左下)
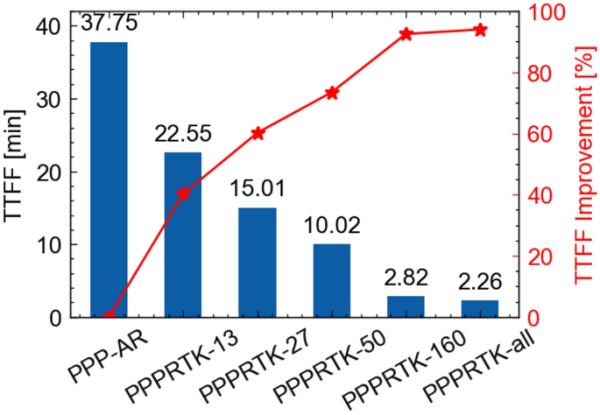
TTFF是评价PPP-RTK大气校正效果的重要指标。TTFF越短,预期的收敛速度越快。一旦正确地确定了歧义,就可以显著提高定位精度。图6总结了不同方案的TTFF,并能够评估对TTFF的影响。标准PPP-AR也作为参考。与PPP-AR相比,相应的改进用红线表示。值得一提的是,结果与数据更新的间隔高度相关。可以注意到,GPS PPP-AR的平均TTFF为38分钟。即使有13个站点产生的大气校正,TTFF也可以减少到23分钟,提高了40%。随着服务器上使用的站点数量的增加,TTFF最多可以减少到2分钟。当使用的站点从50个增加到160个时,TTFF从10分钟缩短到3分钟,提高了72%,这是最显著的改进。结果与Nadarajah等人(2018)的研究结果相似,平均站间距离为30公里。在超过160个站点的情况下,TTFF可以进一步缩短约30%。这一微小的改进与上一节评估的电离层误差图一致,表明即使在160个站点上,更正仍然相似。对TTFF的分析结果表明,TTFF可以从服务器上使用更多的站点中获益。但是对于某些用例,应该考虑成本和用户性能之间的平衡。
图6
使用来自不同网络规模的修正的用户的首次修复时间
对不同方案的固定率进行评估,作为反映歧义解决性能的指标。图7描述了TTFF后的固定率,其定义为具有模糊度分辨率的历元个数与TTFF后的总历元个数之比。图8总结了所有处理过的epoch的固定率。注意到两种固定率的定义不同,预计TTFF后的固定率将高于整体固定率。图7显示,一旦确定了歧义,固定率就保持在较高的水平,超过97%的epoch是固定的。PPPRTK-13方案与PPP-AR方案相比,固定率略有下降,固定率为0.64%,这可能是电离层图误差分析中,13个服务器站产生的校正对所有用户站不够精确的原因。因此,所施加的约束不够合理。随着服务器上站点数量的增加,TTFF后的固定率也略有增加,最高可达99%。与图7的结果相比,在评估所有处理时代的固定率时,增加趋势更为明显。图8中的总体固定率与由于分母变化导致的数据批次间隔相关。总体固定率越大,通常表示收敛速度越快,定位性能越可靠。即使在服务器上使用13个站点来生成大气校正,与数据弧为1小时的PPP-AR相比,总体固定率可以提高23%。然而,当站点数量超过160时,PPP-RTK的总体固定点率并没有显著提高。通过对固定率的分析可以推断,服务器上使用的站点越多,固定率就越高,因此用户性能就越可靠。总体固定率略小于Zhang et al.(2022)的报道;主要原因是数据长度不同。
图7
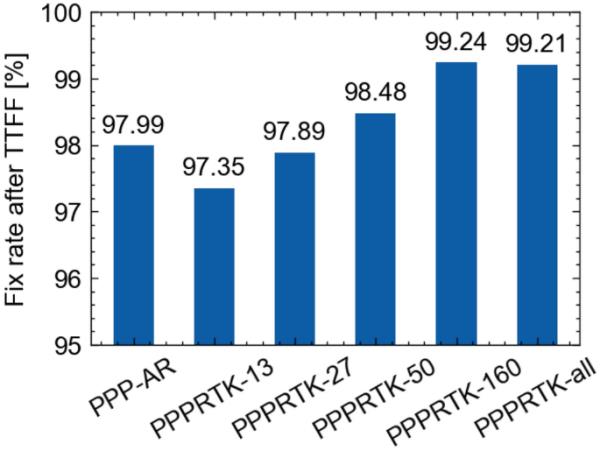
用户使用不同规模网络修正后TTFF的固定率
图8
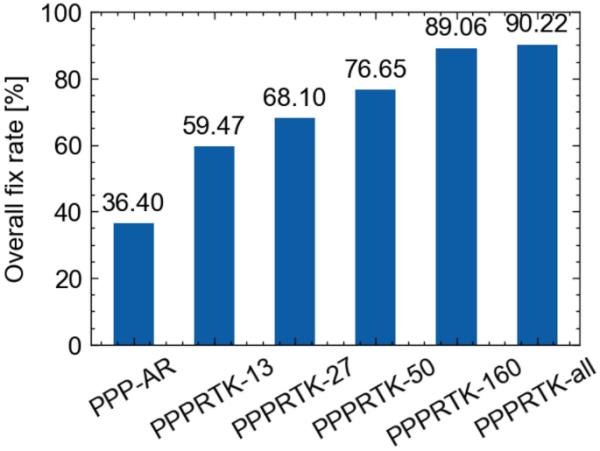
使用来自不同网络规模的校正,固定所有处理过的用户数据批次的比率
首先对水平和垂直分量的第90百分位定位误差进行评估。如图9所示,不同颜色表示不同方案的定位误差时间序列。对于水平和垂直组件,PPPRTK-160和ppprtk -的性能都相似。90%的测试数据集收敛到0.1 m的时间不超过5 min,水平分量和垂直分量的定位精度分别在20 min内达到0.03 m和0.05 m。在没有外部大气校正的情况下,PPP-AR的定位误差最大,收敛时间最长。表3总结了平均和第90个百分位收敛时间的详细定位性能,以及相应的服务器-用户距离中位数。水平分量和垂直分量的PPP-AR平均收敛时间分别为25 min和21 min,使用所有位点进行修正时,平均收敛时间分别缩短为2 min和3 min,分别提高了93%和85%。随着服务器上使用的站点数量的增加,收敛时间普遍呈减小的趋势,即使服务器上只有13个站点,收敛时间也可以大大缩短。然而,当使用超过160个站点时,水平方向和垂直方向的改进分别限制在10%和9%。本研究的收敛时间与Psychas et al.(2020)的部分AR报告结果相当,68 km网络密度的第90百分位收敛时间为5 min,这表明可靠的先验精度可以提高收敛时间。最先进的网络RTK (NRTK)性能在70-100公里的网络配置下可以在5秒左右实现厘米级定位精度(欧洲GNSS机构2019),相比之下,PPP-RTK需要更长的时间来收敛与类似的网络配置。原因可能是PPP-RTK的估计数量比NRTK大。与此同时,NRTK的广播信息随卫星频率的增加而增加,而PPP-RTK则没有变化。
图9
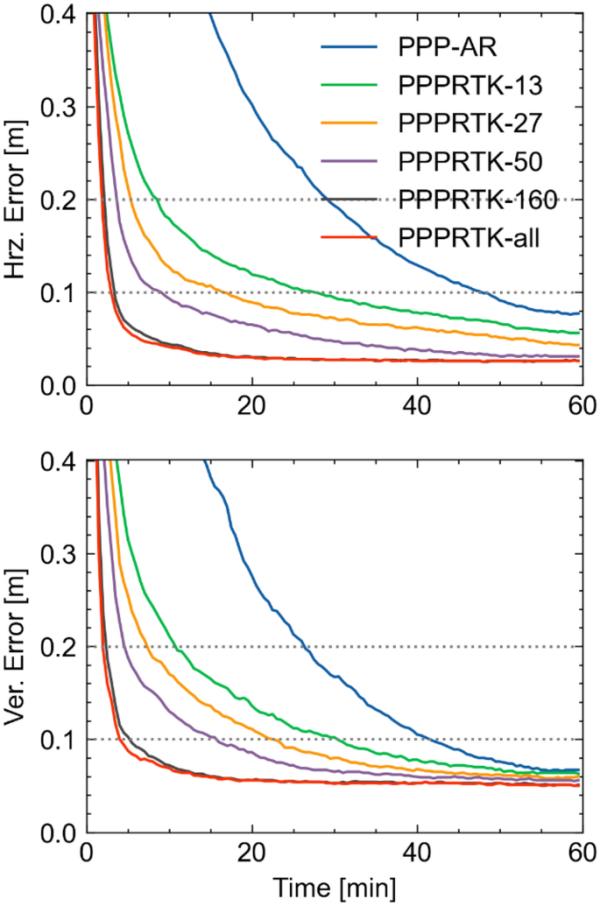
第90百分位水平和垂直定位误差的时间序列
表3公司统计数据不同方案收敛时间(单位:分钟)
摘要
介绍
方法
数据与实验
但又
结果
有限公司
结论和备注
数据可用性
参考文献
致谢
作者信息
道德声明
搜索
导航
#####
使用不同规模的网络,评估了服务器端的PPP-RTK校正和用户端的定位性能。结果可以作为决定服务器预算和用户性能平衡的参考。
PPP-RTK的模拟结果表明,大气校正精度与实现定位精度之间存在较强的正相关关系。垂直方向上的精度提高比水平方向上的精度提高更显著。这主要是由于对流层的修正,主要对垂直分量起作用。此外,研究结果还表明,大气校正的先验精度对定位精度至关重要,且与定位精度高度相关。
(2)服务端PPP-RTK校正结果表明,当站间距离从251 km缩短到50 km时,电离层不确定度图的改善显著;然而,进一步缩短站间距离只能略微改善地图。在服务器边缘区域,由于服务器站的覆盖,电离层精度随着高度的增加而变差。与14点相比,0点的修正更精确,这是由于下午的电离层比午夜更活跃。
最后,用户定位结果表明,电离层折射影响汇聚时间、TTFF和固定速率,而对流层效应主要影响垂直定位的改进。在所有服务器台站进行修正后,TTFF可以达到2 min,与PPP-AR相比有明显的提高。即使使用13个站间距离为251公里的校正,TTFF也可以缩短40%。在服务器上包含的台站越多,站间距离越小,大气修正越可靠,因此可以在更短的TTFF内获得位置。除了TTFF,还评估了固定率,结果表明,服务器上的网络越密集,固定率越高,因此,用户性能越可靠。然而,当站间距离在50 km以内时,改善不显著。这一结果与PPPRTK-160和PPRTK-ALL模拟中电离层不确定性图的评估结果以及定位误差几乎相同的用户性能评估结果一致。站间距离越短,收敛速度越快,即使仅使用13个站点,平均收敛时间在水平和垂直分量上分别比PPP-AR缩短93%和85%。
在本研究中,由于电离层延迟是由卫星实现的,因此仅使用GPS星座来产生大气校正,而电离层延迟是造成大部分大气误差的原因。在未来的工作中,将研究使用多星座和多频率的PPP-RTK校正生成,并且有可能使用多星座,稀疏网络可能有助于实现与本贡献中描述的相同性能,并将满足用户应用。准确可靠的先验精度是加快收敛和TTFF的关键因素;因此,为了进一步提高大气校正的质量和用户性能,研究一种最适合的大气校正精度模型也是值得的。
下载原文档:https://link.springer.com/content/pdf/10.1007/s10291-023-01518-1.pdf

